 Source code
Source codeFeatures
Highlights
| Position data acquisition from various devices, including electromagnetic trackers (Ascension, NDI Aurora) and optical trackers (OptiTrack, NDI Polaris and Certus, Claron MicronTracker) |
 Data acquisition from commercial surgical navigation systems: Medtronic StealthStation navigation system (receives tracking data and planning volume), BrainLab navigation system (receives tracking data, planning volume, and landmarks; through OpenIGTLink) |
 Data acquisition from various positioning devices: prostate LDR brachytherapy steppers (CIVCO, CMS Accuseed, Burdette Medical Systems), daVinci surgical systems (experimental), Kuka LightWeight robot (through OpenIGTLink) |
 Image acquisition from ultrasound systems: through direct digital interface (for Ultrasonix, BK, Interson, Telemed, Philips ultrasound scanners) and through framegrabbers |
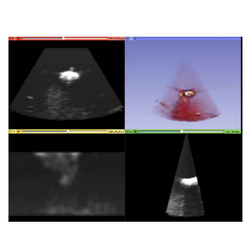
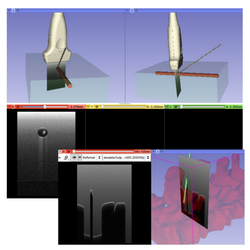 Ultrasound image simulation: B-mode images are generated from multiple moving objects (such as bones, soft tissue, tools), each defined by a simple surface mesh. |
 Image acquisition from various other devices including surgical microscopes, video endoscopes, webcams, USB cameras, Siemens MRI scanners (receives slices in real-time, through OpenIGTLink) |
 Data acquisition from orientation sensors and controllers: PhidgetSpatial, CHRobotics, Microchip inertial sensors; 3Dconnexion 3D mouse |
 Data acquisition from ThorLabs compact CCD spectrometers for real-time navigated optical spectroscopy applications. |
 Data acquisition and control using Arduino devices (through serial interface) |
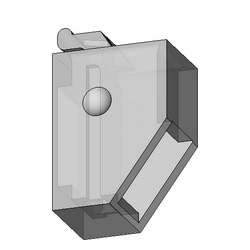
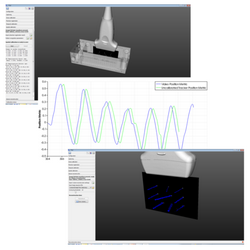 Fully automatic spatial and temporal ultrasound probe calibration: with convenient GUI application, tutorial, 3D printable calibration phantom. Fully automatic temporal calibration of multiple tracking systems. |
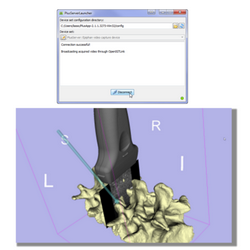 Streaming of live tracked image data to 3D Slicer / SlicerIGT and other OpenIGTLink-compatible applications. |
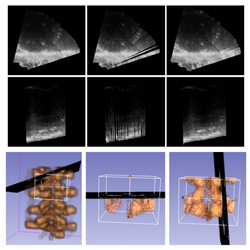 Ultrasound volume reconstruction: performance-optimized, multi-threaded, with advanced hole filling, skin surface contact detection. |
 Support of 8/16-bit grayscale, 24-bit RGB images in 2D+t and 3D+t image streams. Ultrasound RF to B-mode conversion: brightness conversion and scan conversion, for linear and curvilinear transducers. |
 Catalog of freely usable, 3D-printable models of tools and tracking fixtures |
More features
- Matlab interface for real-time sending and receiving of transforms or reading/writing of transforms and image data to/from files (implemented as readily usable Matlab scripts, no need for compiling MEX files, etc.)
- Automatic testing infrastructure, diagnostic tools, simulators for development and testing without having access to hardware devices
- Fully supported on Windows 32 and 64 bit with VS2008, limited testing is performed with VS2010, VS2012, and with gcc on Linux, occasionally tested on Mac OS X
- Many research groups and companies use the toolkit worldwide
- Completely free, no restriction BSD license (for everything, including source code, documentation, CAD models, etc.)